车路协同与自动驾驶研究中心
更新时间:2023-08-02

车路协同与自动驾驶研究中心,以自动驾驶和车路协同发展需求为导向,以核心技术成果转化为目标,为滨江创新中心的车路协同与自动驾驶发展技术支撑,服务行业与产业发展。研究中心聚焦自动驾驶和车路协同,通过开展标准政策制定、核心技术研究、关键产品研发、成果应用示范、产业转化推广等工作,为我国自动驾驶行业发展提供安全、可靠、高效的技术和产品以及可落地的整体解决方案和专业解决方案。研究中心解决方案包括:
(1)城市公共道路复杂场景下自动驾驶解决方案
基于城市公共道路复杂场景下的需求,集智能路侧设备、边缘计算设备、智能车载设备、动态高精度地图、云控平台为一体、构建“数字化、可视化、网络化、智能化”感知体系,建立起全域交通控制网。通过 V2X 技术提升车辆运营效率与安全性,研发安全技术装备;另一方面基于现有单车智能的自动驾驶车辆进行技术升级,实现网联智能,提高城市交通运行效率和安全。
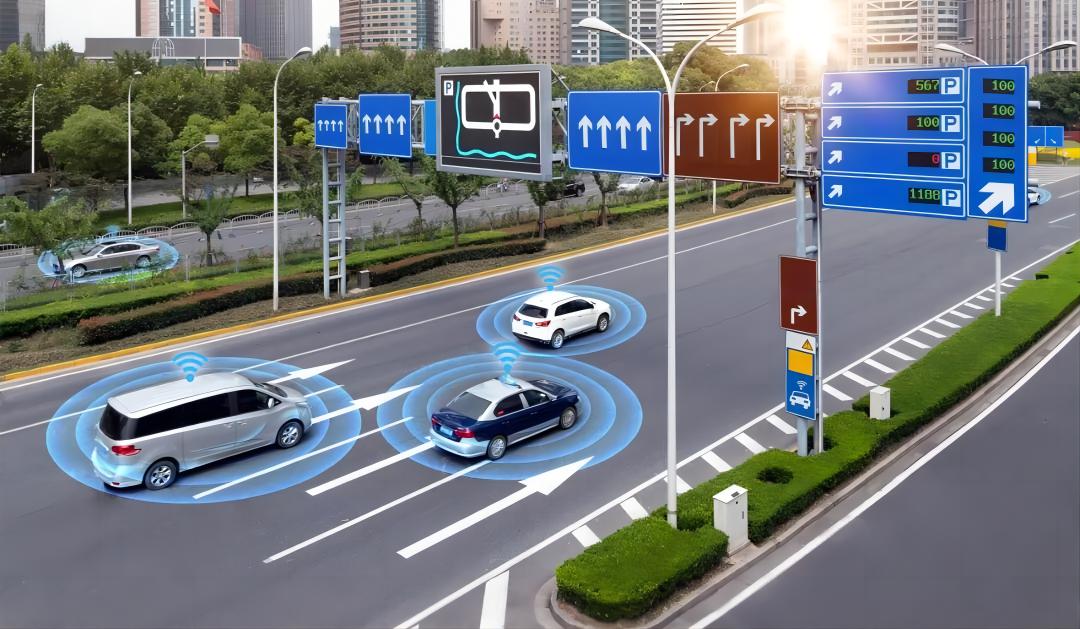
(2)全息感知与智能车路协同应用解决方案
面向自动驾驶环境AI智能认知技术,研发多种传感器及人工智能算法的软硬件架构;基于4D毫米波雷达与多传感器全息感知融合技术,实现自动驾驶系统关键技术的自主开发、测试方法和应用,在江铃新能源、宇通、东风雷诺和江淮等多种车型进行装配,推进自动驾驶车路协同技术的自主化与国产化。
(3)自动驾驶数字孪生与全栈仿真解决方案
为实现自动驾驶低成本、易实施、高可靠、全覆盖的特点,构建高精度动力学车辆模型与高逼真交通场景模型,批量化进行场景测试、仿真和回放,以仿真范式和数字孪生方式支持汽车智能化方向的产品开发与测试,提高自动驾驶算法效率,降低测试运营成本。